Pourquoi un robot humanoïde doté d’une IA avancée peut-il encore fonctionner mal si son électronique n’est pas étroitement coordonnée ?Un mouvement stable dépend de bien plus que du seul calcul.Il nécessite des circuits de détection, de contrôle, de commande de moteur, de communication et de chaîne de signaux pour fonctionner comme un système synchronisé en boucle fermée.Cet article explique comment ces couches fonctionnent ensemble à l'intérieur de robots tels que Tesla Optimus et comment elles influencent l'équilibre, la réactivité et la précision.
Catalogue
Figure 1. Comment fonctionne réellement un robot moderne
Qu’est-ce qui fait que toutes les parties d’un robot fonctionnent comme un système unique ?Dans la conception robotique pratique, les performances globales dépendent non seulement des composants individuels, mais également de l'efficacité avec laquelle ils fonctionnent ensemble.
Lorsqu’un robot humanoïde comme Tesla Optimus marche, le mouvement n’est pas piloté uniquement par l’IA.Cela implique une interaction coordonnée entre les algorithmes de contrôle, les systèmes embarqués et les composants matériels.Chaque mouvement est pris en charge par une architecture électronique structurée qui combine des capteurs, des contrôleurs, des pilotes de moteur et des interfaces de communication.Cette conception en couches est largement utilisée dans les robots industriels et les systèmes d'automatisation avancés, car elle offre un fonctionnement stable et prévisible dans le temps.
Figure 2. Robots humanoïdes marchant en formation coordonnée
Pour mieux comprendre comment ce système est construit, les sections suivantes examineront chaque couche en détail, notamment le contrôle, le mouvement, la détection, la communication et le traitement du signal.
Quelle que soit la qualité des capteurs ou des moteurs, les performances du robot dépendent toujours de la rapidité avec laquelle l'unité de contrôle peut traiter les données et réagir en temps réel.Dans des robots comme Tesla Optimus, la couche de contrôle sert de centre de décision, lisant en permanence les entrées, exécutant des algorithmes de contrôle et mettant à jour les commandes de mouvement en quelques millisecondes.
En robotique humanoïde, les boucles de contrôle doivent s’exécuter dans des délais très courts pour maintenir l’équilibre et la coordination.Lorsqu'un robot ajuste sa posture après une étape, le contrôleur doit traiter les données des capteurs et mettre à jour les commandes du moteur presque immédiatement.Même de légers retards peuvent provoquer une instabilité, une mauvaise coordination ou une réponse plus lente, en particulier dans les systèmes multi-articulés. C'est pourquoi un traitement à faible latence est requis dans les conceptions robotiques réelles.
Figure 3. MCU en tant que cerveau d'un robot
Au niveau d'entrée, le STMicroelectronics
STM32F103C8T6
 STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
constitue un choix pratique pour les systèmes robotiques simples et les applications intégrées compactes telles que les nœuds de capteurs, le contrôle d'actionneurs et les tâches de base de commande de moteur.Il comprend un cœur Arm Cortex-M3 32 bits fonctionnant jusqu'à 72 MHz, ainsi que 64 Ko de Flash, 20 Ko de SRAM, des sorties PWM, des CAN 12 bits et des interfaces de communication standard telles que USART, SPI et I2C.Ces capacités offrent un bon équilibre entre performances, intégration de périphériques et rentabilité.
À mesure que la complexité du système augmente, des contrôleurs plus performants tels que le STMicroelectronics
STM32F407VGT6
 STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
deviennent mieux adaptés.Ce MCU est basé sur un cœur Arm Cortex-M4 32 bits fonctionnant jusqu'à 168 MHz et comprend jusqu'à 1 Mo de Flash et 192 Ko de SRAM, ainsi que des périphériques avancés tels que plusieurs minuteries, des CAN haute vitesse et des instructions DSP.Ces fonctionnalités lui permettent de traiter plusieurs entrées simultanément, telles que les données IMU, les retours d'encodeur et les signaux de communication, sans baisse de performances.Dans les systèmes robotiques pratiques, cela améliore la synchronisation de la boucle de contrôle, réduit la latence et permet un mouvement plus fluide et plus synchronisé sur plusieurs articulations.
Pour les robots humanoïdes avancés ou les applications hautes performances, des contrôleurs tels que le NXP Semiconductors
LPC55S69JBD100K
 LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
peuvent également être envisagés.Cet appareil offre un traitement double cœur et des fonctionnalités de sécurité et périphériques améliorées, ce qui le rend adapté aux environnements de contrôle complexes et multitâches.
Le MCU affecte le comportement du robot pendant son fonctionnement.Un MCU plus lent ou sous-alimenté peut entraîner des réponses retardées, un mouvement instable ou une mauvaise coordination.D’un autre côté, un contrôleur bien adapté garantit que chaque mouvement est calculé et exécuté en douceur, même dans des conditions changeantes.C'est pourquoi la sélection du contrôleur est considérée comme une décision de conception importante en ingénierie robotique.
Dans la conception pratique, les ingénieurs s'appuient rarement sur un seul contrôleur pour l'ensemble du robot.Au lieu de cela, ils utilisent une approche de contrôle en couches, dans laquelle des MCU plus simples gèrent des tâches locales (telles que des moteurs individuels ou des groupes de capteurs), tandis que des contrôleurs plus puissants gèrent des décisions de niveau supérieur.
Si la couche de contrôle est le « cerveau », alors c’est la couche où les décisions deviennent un véritable mouvement.
Mais la question est : le robot se déplacera-t-il en douceur, ou va-t-il trembler, prendre du retard ou perdre en précision ?Dans des robots comme Tesla Optimus, chaque mouvement dépend de la manière dont le système de commande du moteur convertit les commandes numériques en énergie électrique contrôlée.Il ne s’agit pas seulement d’allumer et d’éteindre les moteurs.Il s'agit d'un contrôle précis du courant, d'une précision de synchronisation et de transitions fluides, en particulier dans les systèmes comportant plusieurs articulations travaillant en même temps.
Figure 4. Circuit intégré de pilote de moteur pour un mouvement précis du robot
Pour de nombreux systèmes robotiques de milieu de gamme, l'Allegro MicroSystems
A4988SETTR-T
 A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
est l'une des solutions les plus largement utilisées.Il est conçu pour les moteurs pas à pas et traduit des signaux simples de pas et de direction en courant contrôlé à travers les bobines du moteur.Ce pilote prend en charge le micropas jusqu'à une résolution de 1/16 de pas et fonctionne avec des tensions d'alimentation moteur de 8 V à 35 V, délivrant jusqu'à environ 2 A par bobine avec un refroidissement approprié.Ces fonctionnalités permettent un mouvement plus fluide et une réduction des vibrations, c'est pourquoi il est couramment utilisé dans les imprimantes 3D, les machines CNC et les plates-formes robotiques de base.
À mesure que les systèmes robotiques deviennent plus avancés et plus compacts, les solutions intégrées comme Infineon Technologies TLE9879 offrent plus d'efficacité.Cet appareil combine un microcontrôleur (cœur Arm Cortex-M3 fonctionnant jusqu'à 40 MHz) avec un pilote de moteur dans une seule puce, ainsi que des interfaces intégrées de gestion de l'alimentation et de communication telles que LIN.Il est spécialement conçu pour piloter des moteurs à courant continu à balais et offre une fiabilité de niveau automobile.En intégrant des étages de contrôle et de puissance, il réduit les composants externes, raccourcit les chemins de signal et améliore l'efficacité globale du système.Cela se traduit par une conception de PCB plus simple, une réponse plus rapide et une meilleure fiabilité, en particulier dans les modules robotiques ou les systèmes de contrôle distribués à espace limité.D'autres composants, tels que le Texas Instruments
PCA9538PW
 PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
, jouent également un rôle de support en élargissant les capacités d'E/S.
Dans les systèmes robotiques pratiques, il peut être combiné : des pilotes pas à pas comme l'A4988 pour les axes simples et des dispositifs intégrés comme le TLE9879 pour les conceptions compactes ou à plus haut rendement.Cette approche équilibrée garantit que chaque partie du robot industriel atteint le bon mélange de performances et de simplicité de conception.
Comment un robot humanoïde peut-il détecter ce qui se passe autour de lui ?La couche de perception est le point de départ de cette capacité.Il est chargé de collecter des données physiques telles que le mouvement, l'inclinaison, les vibrations et l'orientation, puis de les convertir en signaux électriques que le système de contrôle peut comprendre.
Dans les robots modernes, la détection n’est pas facultative : elle est continue.Chaque pas, rotation ou mouvement brusque doit être détecté instantanément.Si un robot ne peut pas détecter de petits changements de mouvement, il peut perdre l'équilibre, effectuer des mouvements incorrects ou échouer dans des tâches de précision.Ce robot est-il doté d'une détection de mouvement rapide et fiable ?Une couche de perception solide garantit que le robot peut se corriger en temps réel, conduisant à un fonctionnement plus fluide et plus sûr.
Les capteurs de mouvement comme l'accéléromètre Analog Devices
ADXL345BCCZ-RL7
 ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
sont largement utilisés dans les systèmes de perception robotique.Cet accéléromètre numérique à 3 axes offre des plages de mesure sélectionnables de ±2 g, ±4 g, ±8 g et ±16 g, ainsi qu'une haute résolution (jusqu'à 13 bits) et une faible consommation d'énergie aussi faible que 23 µA en mode mesure.Il communique via des interfaces I2C ou SPI et comprend des fonctionnalités intégrées telles que la détection des prises, la détection de chute libre et la surveillance de l'activité/inactivité.Ces capacités permettent au robot de détecter les vibrations, l'inclinaison et les mouvements brusques avec une bonne précision, ce qui le rend adapté au maintien de la posture, à la stabilisation des mouvements et à la prévention des contraintes mécaniques.Dans des systèmes tels que les bras robotiques ou les robots mobiles, l’étalonnage permet de conserver des données précises et fiables, ce qui est important pour un contrôle stable.
Figure 5. Un robot humanoïde détectant et analysant son environnement en temps réel
Mais si vous avez besoin d'un module plus avancé, des capteurs combinés tels que le STMicroelectronics LSM6DSOX offrent un niveau d'intégration et de performances plus élevé.Cet appareil intègre un accéléromètre à 3 axes et un gyroscope à 3 axes dans un seul boîtier, prenant en charge des plages d'accéléromètre jusqu'à ± 16 g et une plage de gyroscope jusqu'à ± 2 000 dps.Il comprend également un noyau d'apprentissage automatique (MLC) intégré et une machine à états finis (FSM), permettant un traitement de base des bords directement sur le capteur.Avec des débits de données de sortie élevés (jusqu'à plusieurs kHz) et une faible latence, il permet le suivi simultané du mouvement linéaire et du mouvement de rotation avec une synchronisation étroite.Cela le rend idéal pour les applications nécessitant équilibre, coordination et réponse en temps réel, telles que les robots humanoïdes, les drones et les systèmes de mouvement multi-axes.
Dans les environnements hautes performances ou à réponse rapide, la vitesse devient le facteur décisif.C'est là que se démarquent les capteurs comme le TDK InvenSense
ICM-20602
 ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
.Que peut apporter ce circuit intégré ?Il offre un suivi de mouvement à faible latence et à grande vitesse, permettant au robot de réagir presque instantanément aux changements.
Mais le robot peut-il maintenir sa stabilité dans des conditions changeantes ?Cela dépend de l’efficacité avec laquelle la couche de perception transmet continuellement les données au système de contrôle.Un système de détection bien conçu garantit que chaque mouvement est surveillé et ajusté en temps réel.Cette approche est largement utilisée en robotique car elle améliore la précision, réduit les risques de panne et garantit des performances constantes même dans des environnements imprévisibles.
Quels facteurs affectent la communication entre les composants du robot ?Dans les robots humanoïdes, les données sont constamment échangées entre les capteurs, les contrôleurs et les systèmes moteurs.Cette communication doit rester stable même en cas de charges de données importantes, car les retards, le bruit ou la perte de données peuvent réduire la précision et affecter les performances globales.Un système de communication bien conçu assure un transfert de données fiable, permettant au robot de rester précis et réactif en temps réel.
Les robots modernes s'appuient sur le protocole CAN (Controller Area Network) pour gérer cette communication.CAN permet à plusieurs appareils de partager un seul réseau tout en donnant la priorité aux messages critiques.Cela se traduit par une coordination efficace entre les sous-systèmes et réduit le risque de conflits de données, en particulier dans les systèmes robotiques multi-axes complexes.

Figure 6. Robot industriel utilisant la communication CAN pour connecter et coordonner les systèmes internes
La stabilité de la communication dépend des circuits intégrés émetteur-récepteur tels que le NXP
TJA1050
 TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
.Cet émetteur-récepteur CAN haute vitesse est conforme à la norme ISO 11898 et prend en charge des débits de données allant jusqu'à 1 Mbit/s, ce qui le rend adapté à la communication en temps réel dans la robotique et les systèmes industriels.Il fonctionne généralement à partir d'une alimentation de 5 V et s'interface directement avec les contrôleurs CAN du microcontrôleur via les broches TXD et RXD.Le dispositif convertit les signaux logiques asymétriques en sorties différentielles CANH et CANL, ce qui améliore considérablement l'immunité au bruit sur les longs parcours de câbles.Il présente également une faible émission électromagnétique (EME), une immunité électromagnétique élevée (EMI), une protection thermique et une protection contre les courts-circuits sur les lignes de bus.
Qu’en est-il de l’évolutivité du système robot ?Si vous envisagez d'étendre ou de mettre à niveau vos systèmes à l'avenir, la communication basée sur CAN facilite cette tâche car de nouveaux modules peuvent être ajoutés au même réseau sans repenser l'ensemble du système.Cette flexibilité constitue un avantage majeur pour les applications en croissance telles que les lignes d’automatisation ou les plateformes robotiques avancées.
Les moteurs haute puissance et les circuits à commutation rapide génèrent du bruit électrique qui peut interférer avec les signaux de commande sensibles.Dans les systèmes robotiques, cela crée un défi car les circuits de commande basse tension doivent fonctionner aux côtés des étages de puissance haute tension.Sans protection adéquate, les interférences peuvent entraîner un fonctionnement instable, des données de capteur inexactes et une fiabilité réduite du système.
Alors, le robot restera-t-il stable lorsque les moteurs tournent à pleine charge ?Peut-il maintenir des lectures précises des capteurs dans des environnements bruyants ?Pour résoudre ce problème, les robots modernes utilisent une isolation numérique pour séparer les sections de commande et de puissance.Cela permet aux données de passer entre les circuits sans connexion électrique directe, empêchant ainsi le bruit et les pics de tension d'affecter les signaux critiques.En conséquence, le système peut maintenir un fonctionnement stable et des lectures précises des capteurs, même dans des environnements électriquement bruyants.

Figure 7.
ADUM1200
ADUM1200
AD
Out Stock
et
ADUM1201
ADUM1201
DIGITAL
Out Stock
Selon les fiches techniques d'Analog Devices, des appareils tels que l'ADuM1200 et l'ADuM1201 fournissent une isolation numérique en transférant des signaux à travers une barrière d'isolation magnétique interne sans aucune connexion électrique directe.Les deux sont des isolateurs numériques à double canal basés sur la technologie iCoupler®, capables de débits de données allant jusqu'à 25 Mbps tout en conservant un faible délai de propagation et une précision de synchronisation stricte.Ils prennent généralement en charge des tensions d'isolement allant jusqu'à 2,5 kV RMS (selon la variante de boîtier), ce qui les rend adaptés à la séparation des circuits de commande basse tension des étages de puissance haute tension.
L'ADuM1200 dispose de deux canaux aller-retour, tandis que l'ADuM1201 fournit un canal aller et un canal inverse, permettant une communication bidirectionnelle dans les systèmes de contrôle.Ces dispositifs fonctionnent à partir de tensions d'alimentation standard (généralement 3,3 V ou 5 V) et consomment relativement peu d'énergie par rapport aux optocoupleurs traditionnels, tout en offrant également une fiabilité améliorée et une durée de vie plus longue grâce à l'absence de LED.
En maintenant l'intégrité du signal, l'isolation améliore non seulement la stabilité et la précision du système, mais protège également les circuits sensibles des contraintes électriques, réduisant ainsi le risque de panne et assurant un fonctionnement fiable dans des environnements industriels continus.
Comment Tesla Optimus et d’autres plateformes basées sur l’IA convertissent-ils les signaux bruts des capteurs en données numériques précises pour une prise de décision précise ?Les capteurs ne produisent pas de signaux numériques prêts à l'emploi ;au lieu de cela, ils génèrent de petites tensions analogiques qui représentent le mouvement, la force ou la position.Ces signaux sont souvent faibles et sensibles au bruit, ils doivent donc être correctement conditionnés avant que le système de contrôle puisse les utiliser de manière fiable.Si ce processus n’est pas géré correctement, même les systèmes d’IA avancés peuvent avoir des difficultés en termes de précision et de cohérence.
Le processus commence par le conditionnement du signal, dans lequel des amplificateurs de précision tels que l'AD8510 d'Analog Devices jouent un rôle.L'AD8510 est un amplificateur opérationnel d'entrée/sortie rail à rail à faible bruit conçu pour le traitement du signal de haute précision, avec une tension de décalage d'entrée généralement d'environ 1 mV et un faible courant de polarisation, ce qui le rend adapté aux interfaces de capteurs sensibles.Il fonctionne sur une plage d'alimentation de 2,7 V à 5,5 V et offre un produit de gain en bande passante d'environ 8 MHz avec une vitesse de montée d'environ 5 V/µs, ce qui lui permet de gérer des signaux analogiques à évolution rapide sans distorsion.Sa faible distorsion harmonique totale (THD) et son gain élevé en boucle ouverte garantissent l'intégrité du signal, tandis que des fonctionnalités telles que la protection contre les courts-circuits et un fonctionnement stable avec des charges capacitives le rendent fiable dans les conceptions de circuits réelles.Dans les environnements dynamiques, d'autres composants comme l'AD8338 peuvent également être utilisés pour le contrôle de gain variable.
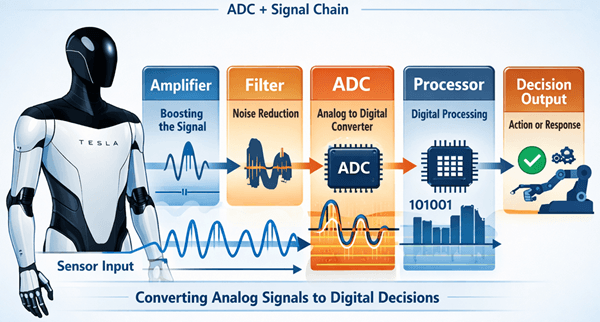
Figure 8. Traitement analogique-numérique dans les robots humanoïdes
Une fois conditionnés, les signaux analogiques sont convertis en données numériques à l'aide de CAN hautes performances tels que l'AD7616.Cet appareil est un convertisseur analogique-numérique à échantillonnage simultané à 16 canaux avec une véritable résolution de 16 bits et un débit jusqu'à 1 MSPS, permettant une acquisition de données précise et rapide sur plusieurs canaux.Il prend en charge les plages d'entrée ±10 V et ±5 V avec un frontal analogique intégré, éliminant ainsi le besoin de nombreux composants externes.L'AD7616 présente un rapport signal/bruit (SNR) élevé d'environ 90 dB et une faible non-linéarité intégrale (INL), garantissant des mesures précises et répétables.Il comprend également des interfaces série et parallèle flexibles (compatibles SPI), des options de référence sur puce et une fonctionnalité de séquenceur pour une analyse efficace des canaux.
Dans les plates-formes robotiques multi-capteurs, les performances de l'ADC ont un impact direct sur la qualité des décisions.L'échantillonnage simultané garantit que les données de plusieurs capteurs restent alignées dans le temps, évitant ainsi les incohérences qui pourraient conduire à une interprétation incorrecte ou à une réponse retardée.Une amplification propre combinée à une conversion haute résolution permet au système de contrôle de traiter des données précises du monde réel.
Cette étape constitue le pont entre la détection et l’intelligence.Grâce à un conditionnement précis des signaux et à des performances ADC fiables, les systèmes robotiques peuvent interpréter leur environnement avec précision et réagir par des actions fluides, stables et coordonnées, même dans des conditions complexes et en évolution rapide.
Les robots modernes utilisent l'architecture IC car le contrôle du robot n'est pas une tâche unique.La détection, la conversion du signal, la prise de décision, la communication et l'actionnement du moteur doivent tous fonctionner en continu et dans le bon ordre.Si ces fonctions ne sont pas séparées en étapes claires, le bruit, les retards de synchronisation et les conflits de signaux peuvent réduire la précision du mouvement et la stabilité du système.
Une architecture électronique en couches facilite la gestion de ce flux de travail.Les capteurs fournissent une entrée réelle, les circuits ADC et de chaîne de signaux préparent les données utilisables, les microcontrôleurs traitent la logique de contrôle, les pilotes de moteur exécutent le mouvement et l'isolation numérique CAN plus aide à maintenir un transfert de données fiable entre les modules.Cette structure correspond au parcours opérationnel réel à l’intérieur d’un robot, c’est pourquoi elle est largement utilisée dans les systèmes robotiques humanoïdes, industriels et autonomes.
Un robot humanoïde ne se déplace bien que lorsque son électronique fonctionne comme une chaîne coordonnée plutôt que comme des pièces isolées.Dans les conceptions pratiques, des contrôleurs tels que le
STM32F407VGT6
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
gèrent une prise de décision rapide, des dispositifs moteurs tels que l'
A4988SETTR-T
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
ou le TLE9879 transforment les commandes en mouvement stable et des capteurs tels que le LSM6DSOX fournissent les données de mouvement en temps réel nécessaires à l'équilibre et à la correction.Les dispositifs de communication tels que le
TJA1050
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
maintiennent les sous-systèmes synchronisés, tandis que les isolateurs tels que l'
ADUM1200
ADUM1200
AD
Out Stock
et l'
ADUM1201
ADUM1201
DIGITAL
Out Stock
aident à protéger la précision du signal dans les environnements électriques bruyants.Les étages de conditionnement du signal et les CAN comme l'AD7616 convertissent ensuite les entrées analogiques faibles en informations numériques utilisables pour la boucle de contrôle.Lorsque ces couches restent alignées en termes de timing, de qualité des données et de réponse, le robot peut se déplacer en douceur et réagir de manière fiable.Dans le cas contraire, même l’IA avancée ne peut pas compenser l’instabilité de l’électronique.
Partagez ce message